

Paper Mechatronics
We are exploring new functions and applications that can be created by converting electronic circuits, which were previously designed in two dimensions, into three dimensions (giving them form and movement).
Specifically, we are forming three-dimensional circuits using a technology in which the substrate forms an autonomous structure by causing a physicochemical reaction with a printing solution.
We are conducting research both to elucidate the physics behind this autonomous structure-forming technology and to apply it to functional origami structures with electronic circuits stretched over them.
We are also exploring forms of engineering that do not place a burden on the environment, with an awareness of sustainable development. We contribute to the development of the global environment through research into electronic circuits using paper as a substrate and novel energy-saving actuators that utilize static electricity.
- Shigemune, H., Maeda, S., Cacucciolo, V., Iwata, Y., Iwase, E., Hashimoto, S., & Sugano, S. (2017). Printed paper robot driven by electrostatic actuator. IEEE Robotics and Automation Letters, 2(2), 1001-1007.
- Shigemune, H., Maeda, S., Hara, Y., Hosoya, N., & Hashimoto, S. (2016). Origami robot: a self-folding paper robot with an electrothermal actuator created by printing. IEEE/ASME Transactions on Mechatronics, 21(6), 2746-2754.
Self-folding Origami

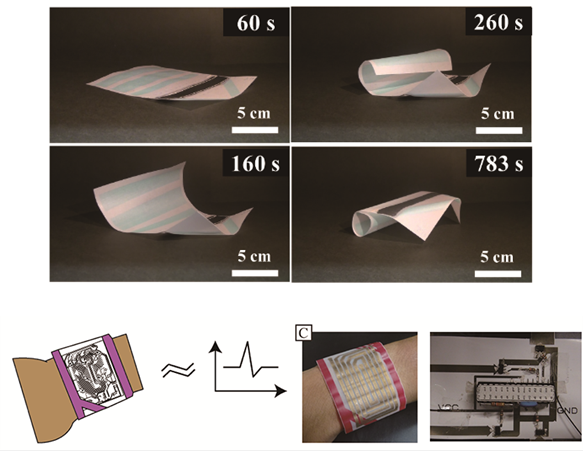
Our core technology “Self-folding paper” technology allows paper to fold itself towards various origami structures.
Through mechanical tests and simulations, we search for the optimum folding pattern that exhibits the unique stretchable and crushable properties of the origami structures.
Through chemical analyses, we also try to understand the underlying mechanism of ‘Self-folding Paper’ phenomenon.
Keywords: Mechanical Engineering, Origami Structures, Functional Materials, Self-folding, Materials Engineering, Chemical Analysis
- Fukatsu, Y., & Shigemune, H. (2022). Development of Self‐Folded Corrugated Structures Using Automatic Origami Technique by Inkjet Printing. Advanced Intelligent Systems, 2100260.
- Shigemune, H., Maeda, S., Iwase, E., Hashimoto, S., Sugano, S., & Sawada, H. (2021). Programming Stepwise Motility into a Sheet of Paper Using Inkjet Printing. Advanced Intelligent Systems, 3(1), 2000153.
Origami Device
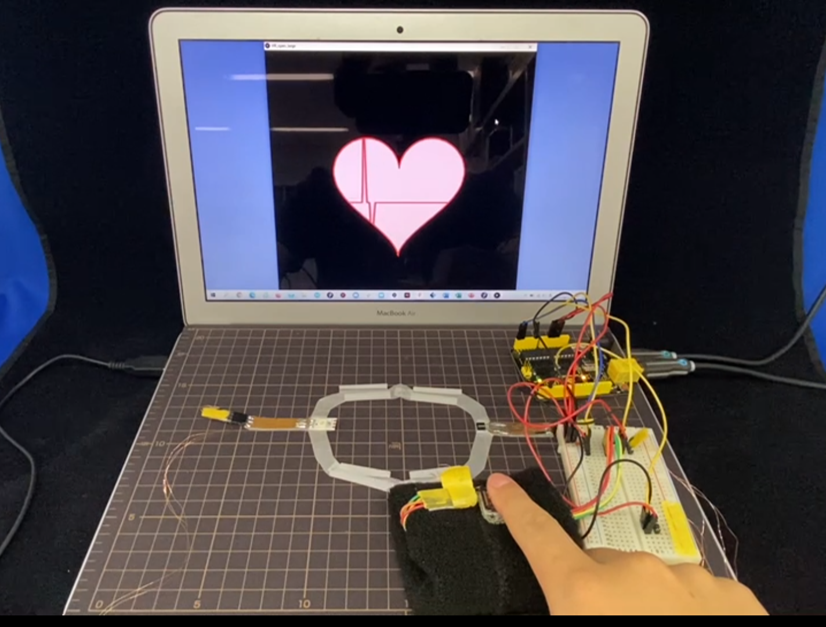
To design novel IoT devices, electrical and electronic circuits are designed within the origami structures. The circuits can “print” by filling an inkjet printer with conductive ink, much like printing text or photographs.
The picture on the left shows an example of an application in a healthcare device, where sensors are embedded within mask spacers fabricated using origami technology to measure heart rate and carbon dioxide concentration.
We are also working on driving devices using energy that is discarded in the world with the aim of sustainable development.
Keywords: Electrical Engineering, Printed Electronics, IoT devices, Sensors, Energy Harvesting, Healthcare, Agriculture
- Shigemune, H., Maeda, S., Cacucciolo, V., Iwata, Y., Iwase, E., Hashimoto, S., & Sugano, S. (2017). Printed paper robot driven by electrostatic actuator. IEEE Robotics and Automation Letters, 2(2), 1001-1007.
- Shigemune, H., Maeda, S., Hara, Y., Koike, U., & Hashimoto, S. (2015, September). Kirigami robot: Making paper robot using desktop cutting plotter and inkjet printer. In 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS) (pp. 1091-1096). IEEE.
Machine Learning
Information processing techniques are essential for transforming device data into human-understandable information. Information is extracted by processing signals output from devices using python and MATLAB.
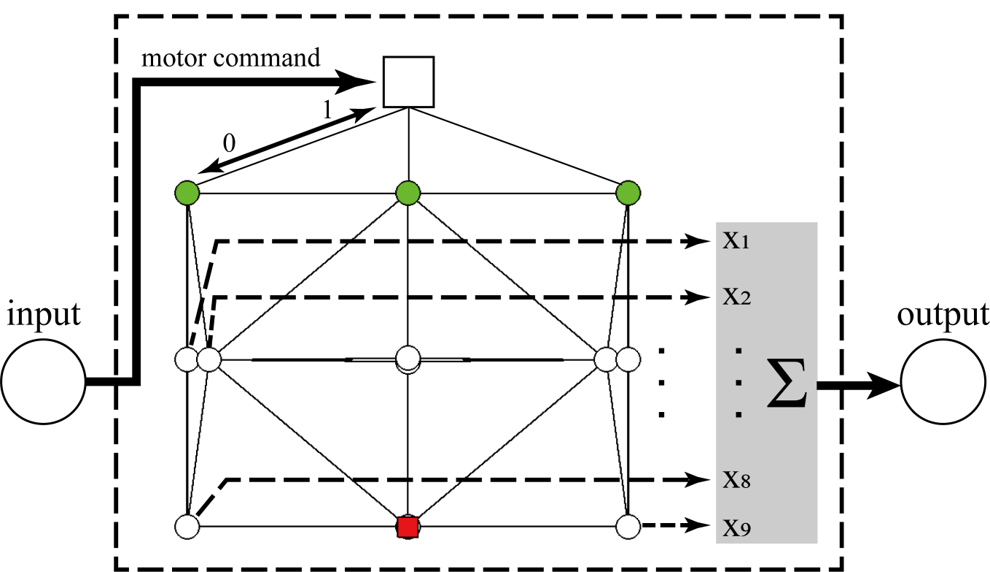
Practical applications of origami devices are aimed at through classification learning using support vector machines (SVM) and time series data processing using physical reservoir computing (PRC).
Keywords: Information Engineering, AI, Artificial Intelligence, Deep Learning, Support Vector Machine, Physical Reservoir Computing, python, MATLAB
- Musha, A., Daihara, M., Shigemune, H., & Sawada, H. (2020, September). Morphological Computation of Skin Focusing on Fingerprint Structure. In International Conference on Artificial Neural Networks (pp. 470-481). Springer, Cham.
Soft Robotics

The development of devices and robots that utilize soft materials and focus on human interaction is underway.
The features such as quietness, light weight and low heat dissipation are used for applications in medicine, nursing care, agriculture and other fields.
Soft actuators such as EHD, DEA and SMA are also important elemental technologies for soft robotics.
Keywords: Robotics, Soft Actuators, Artificial Muscles, Wearable Devices
- Shigemune, H., Pradidarcheep, K., Kuwajima, Y., Seki, Y., Maeda, S., & Cacucciolo, V. (2021). Wireless electrohydrodynamic actuators for propulsion and positioning of miniaturized floating robots. Advanced Intelligent Systems, 3(7), 2100004.
- Abe, K., Seki, Y., Kuwajima, Y., Minaminosono, A., Maeda, S., & Shigemune, H. (2022). Low-Voltage Activation Based on Electrohydrodynamics in Positioning Systems for Untethered Robots. Journal of Robotics and Mechatronics, 34(2), 351-360.
Electro Hydro Dynamics(EHD)

EHD is a phenomenon in which flow occurs when high voltage is applied to an insulating fluid. Pneumatic actuators have been attracting attention as soft actuators, but their compressor-based drive has the disadvantages of noise and system bloat; EHD allows direct electrical control of the fluid and is expected to enable quiet drive in compact systems.
Like DEA/SMA described below, EHD is expected to be one of the next generation artificial muscle technologies with features such as low noise and high power density.
Joint research EPFL Dr. Vito Cacucciolo, Shibaura Institute of Technology, Maeda Lab.
- Shigemune, H., Sugano, S., Sawada, H., Hashimoto, S., Kuwajima, Y., Matsushita, Y., … & Laschi, C. (2017, December). Swinging paper actuator driven by conduction electrohydrodynamics. In 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 379-384). IEEE.
- Cacucciolo, V., Shintake, J., Kuwajima, Y., Maeda, S., Floreano, D., & Shea, H. (2019). Stretchable pumps for soft machines. Nature, 572(7770), 516-519.
Dielectric Elastomer Actuators(DEA)
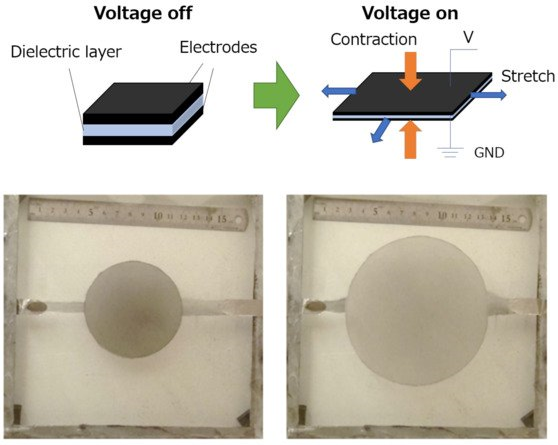
DEA consists of a dielectric elastomer sandwiched between flexible electrodes. When high voltage is applied to the flexible electrodes, Coulomb forces are generated, causing the elastomers to be compressed longitudinally and pulled laterally at the same time. The effect of electrode characteristics and patterns on drive performance is addressed by treating it as a kneading problem of electric fields and stresses.
We are also designing and evaluating high-voltage control circuits that can simultaneously control multiple DEA/EHD actuators.
Joint research Maeda Lab, Shibaura Institute of Technology
- Shigemune, H., Sugano, S., Nishitani, J., Yamauchi, M., Hosoya, N., Hashimoto, S., & Maeda, S. (2018, September). Dielectric elastomer actuators with carbon nanotube electrodes painted with a soft brush. In Actuators (Vol. 7, No. 3, p. 51). Multidisciplinary Digital Publishing Institute.
Shape Memory Alloys(SMA)
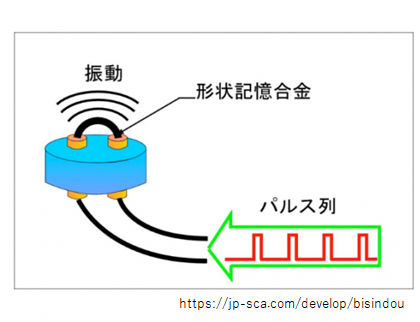
Our research focuses on microvibrations generated by sending pulse signals to shape memory alloys. The micro-vibrations can change the tactile feel and texture of the surface. The output voltage can also be measured and used as a sensor, making it possible to construct a compact system as a multi-transducer that integrates an actuator and a sensor.
Joint research Sawada Lab, Waseda Univ.
Electroadhesion
We are conducting research on self-propelled oil droplets as a study of object transport driven wirelessly over a water surface. By attaching a frame to an oil drop on an aqueous solution, we aim to control the Marangoni convection currents generated inside and the driving direction and velocity of the oil drop.。
Joint research Maeda Lab, Shibaura Institute of Technology
- Okuno, Y., Shigemune, H., Kuwajima, Y., & Maeda, S. (2019). Stretchable suction cup with electroadhesion. Advanced Materials Technologies, 4(1), 1800304.
Self-propelled Droplet
We are conducting research on self-propelled oil droplets as a study of object transport driven wirelessly over a water surface. By attaching a frame to an oil drop on an aqueous solution, we aim to control the Marangoni convection currents generated inside and the driving direction and velocity of the oil drop.
Joint research Waseda Univ. Sawada Lab, Shibaura Institute of Technology, Maeda Lab.
- Suzuki, A., Maeda, S., Hara, Y., & Hashimoto, S. (2012, October). Capsule gel robot driven by self-propelled oil droplet. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2180-2185). IEEE.
- Yamada, M., Shigemune, H., Maeda, S., & Sawada, H. (2019). Directional and velocity control of active droplets using a rigid-frame. RSC Advances, 9(69), 40523-40530.