

ペーパーメカトロニクス
Paper Mechatronics
これまで2次元で設計されていた電子回路を3次元化する(形態・動きの付与)ことで産まれる新しい機能・応用を探索しています。
具体的には、印刷溶液と物理化学反応を起こすことによって基板が自律的に構造形成する技術を利用して立体回路を形成します。
本自律構造形成技術の中に潜む物理の解明と、電子回路の張り巡らされた機能性折り紙構造体の応用の両面から研究を進めています。
また、持続可能な発展を意識した、環境に負担をかけないエンジニアリングの形も模索しています。紙を基板とした電子回路、静電気を利用した省エネルギーな新奇アクチュエータの研究を通して地球環境の発展に貢献します。
- Shigemune, H., Maeda, S., Cacucciolo, V., Iwata, Y., Iwase, E., Hashimoto, S., & Sugano, S. (2017). Printed paper robot driven by electrostatic actuator. IEEE Robotics and Automation Letters, 2(2), 1001-1007.
- Shigemune, H., Maeda, S., Hara, Y., Hosoya, N., & Hashimoto, S. (2016). Origami robot: a self-folding paper robot with an electrothermal actuator created by printing. IEEE/ASME Transactions on Mechatronics, 21(6), 2746-2754.
自動折紙
Self-folding Origami

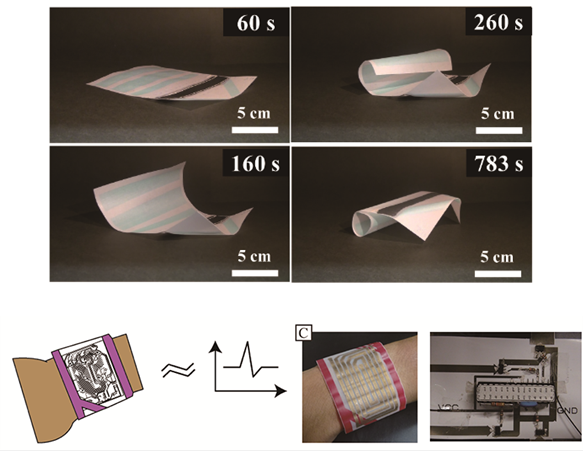
我々のコア技術である「紙の自律構造形成」技術によって様々な折り紙構造に向かって紙がひとりでに折れ曲がっていきます。
力学試験・シミュレーションを通して、折紙構造特有のクラッシャブル・ストレッチャブル特性を発現する最適な折りパターンの探索を行います。
また、物理的・化学的分析を通して「紙の自律構造形成」技術メカニズムの理解も行っています。
キーワード:機械工学、折紙構造、機能性材料、自動折紙、Self-folding、材料工学、化学分析
- Fukatsu, Y., & Shigemune, H. (2022). Development of Self‐Folded Corrugated Structures Using Automatic Origami Technique by Inkjet Printing. Advanced Intelligent Systems, 2100260.
- Shigemune, H., Maeda, S., Iwase, E., Hashimoto, S., Sugano, S., & Sawada, H. (2021). Programming Stepwise Motility into a Sheet of Paper Using Inkjet Printing. Advanced Intelligent Systems, 3(1), 2000153.
折紙デバイス
Origami Device
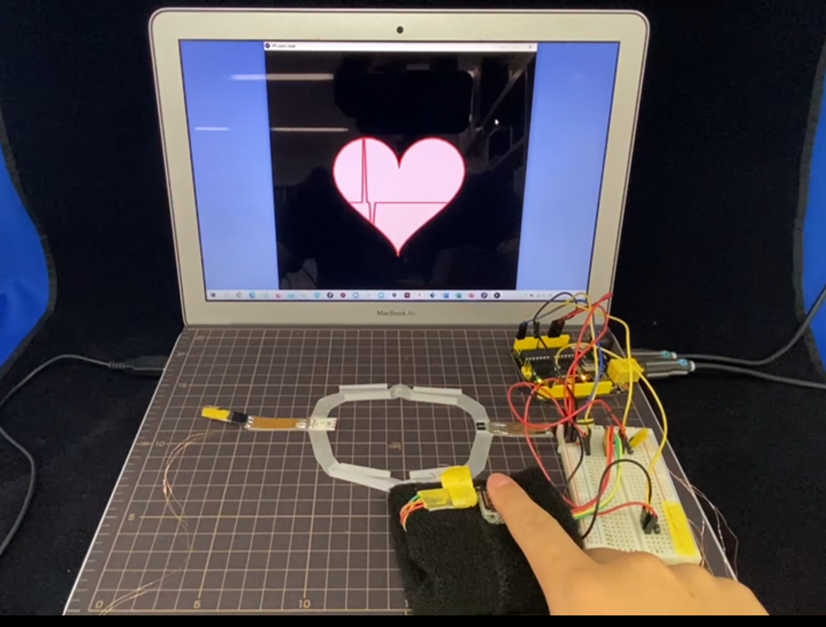
新奇IoTデバイスを設計するために、折紙構造内に張り巡らせる電気電子回路を設計します。回路は導電性インクをインクジェットプリンタに充填することで文章・写真を印刷するように作製できます。
左の写真は折紙技術で作製したマスクスペーサ内にセンサを埋め込み心拍数と二酸化炭素濃度を測定することで、ヘルスケアデバイスに応用した例です。
また、持続的な開発を目標に世の中で捨てられているエネルギーを利用したデバイス駆動にも取り組んでいます。
キーワード:電気電子工学、プリンテッドエレクトロニクス、IoTデバイス、センサ、エナジーハーベスティング、ヘルスケア
- Shigemune, H., Maeda, S., Cacucciolo, V., Iwata, Y., Iwase, E., Hashimoto, S., & Sugano, S. (2017). Printed paper robot driven by electrostatic actuator. IEEE Robotics and Automation Letters, 2(2), 1001-1007.
- Shigemune, H., Maeda, S., Hara, Y., Koike, U., & Hashimoto, S. (2015, September). Kirigami robot: Making paper robot using desktop cutting plotter and inkjet printer. In 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS) (pp. 1091-1096). IEEE.
機械学習
Machine Learning
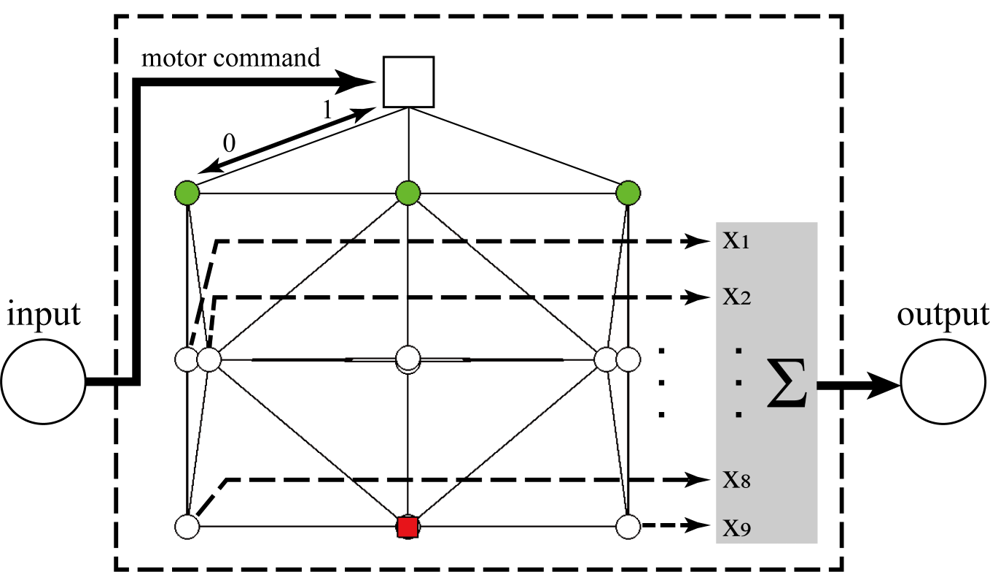
デバイスのデータを人間が理解可能な情報に変化するために、情報処理技術は不可欠です。デバイスから出力された信号をpython, MATLABを利用して処理することで情報を抽出します。
サポートベクターマシン(SVM)を利用した分類学習、物理レザバーコンピューティング(PRC)を利用した時系列データ処理などを通して折紙デバイスの実用化を目指します。
キーワード:情報工学、AI、人工知能、ディープラーニング、サポートベクターマシン、物理レザバーコンピューティング, python,
- Musha, A., Daihara, M., Shigemune, H., & Sawada, H. (2020, September). Morphological Computation of Skin Focusing on Fingerprint Structure. In International Conference on Artificial Neural Networks (pp. 470-481). Springer, Cham.
ソフトロボティクス
Soft Robotics
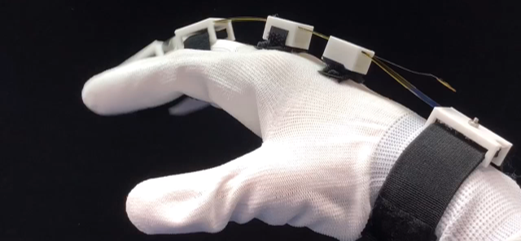
柔らかい材料を利用した人とのインタラクションを重視したデバイス・ロボットの開発を行っています。
静音・軽量・低排熱と言った特徴を利用して、医療・介護・農業等への応用を想定しています。
以下のEHD,DEA,SMAといったソフトアクチュエータもソフトロボティクスの重要な要素技術となります。
キーワード:ロボティクス、ソフトアクチュエータ、人工筋肉、ウェアラブルデバイス
- Shigemune, H., Pradidarcheep, K., Kuwajima, Y., Seki, Y., Maeda, S., & Cacucciolo, V. (2021). Wireless electrohydrodynamic actuators for propulsion and positioning of miniaturized floating robots. Advanced Intelligent Systems, 3(7), 2100004.
- Abe, K., Seki, Y., Kuwajima, Y., Minaminosono, A., Maeda, S., & Shigemune, H. (2022). Low-Voltage Activation Based on Electrohydrodynamics in Positioning Systems for Untethered Robots. Journal of Robotics and Mechatronics, 34(2), 351-360.
Electro Hydro Dynamics(EHD)

EHDは絶縁性流体に高電圧を印加すると流動が発生する現象です。ソフトアクチュエータでは空気圧アクチュエータが注目されていますが、コンプレッサーによる駆動は騒音・システムを肥大化するという欠点があります。EHDを用いることで流体を直接電気制御でき、コンパクトなシステムで静音に駆動することが期待されています。
後述のDEA/SMAと同様、静音・高密度パワーといった特徴を持つ次世代の人工筋肉技術の1つと期待されています。
EPFL Dr. Vito Cacucciolo, 芝浦工大 前田研 共同研究
- Shigemune, H., Sugano, S., Sawada, H., Hashimoto, S., Kuwajima, Y., Matsushita, Y., … & Laschi, C. (2017, December). Swinging paper actuator driven by conduction electrohydrodynamics. In 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 379-384). IEEE.
- Cacucciolo, V., Shintake, J., Kuwajima, Y., Maeda, S., Floreano, D., & Shea, H. (2019). Stretchable pumps for soft machines. Nature, 572(7770), 516-519. (謝辞)
Dielectric Elastomer Actuators(DEA)
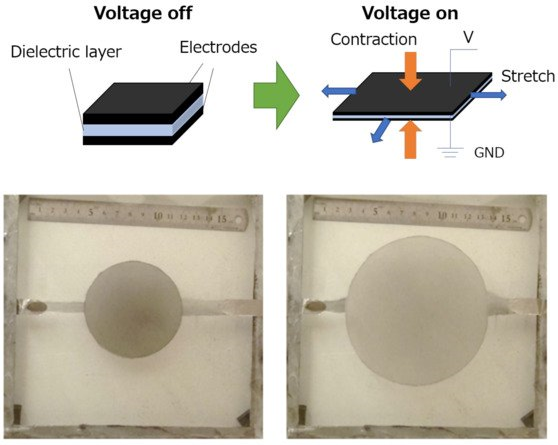
DEAは誘電エラストマを柔軟電極で挟み込むことによって構成されます。柔軟電極に高電圧を印加するとクーロン力が発生し、エラストマが縦方向に圧縮されると同時に、横方向に引張されていきます。電極特性・パターンが駆動性能に及ぼす影響を、電界・応力の練成問題として扱い、取り組んでいます。
複数のDEA/EHDアクチュエータを同時制御可能な、高電圧制御回路の設計・評価も行っています。
芝浦工大 前田研 共同研究
- Shigemune, H., Sugano, S., Nishitani, J., Yamauchi, M., Hosoya, N., Hashimoto, S., & Maeda, S. (2018, September). Dielectric elastomer actuators with carbon nanotube electrodes painted with a soft brush. In Actuators (Vol. 7, No. 3, p. 51). Multidisciplinary Digital Publishing Institute.
Shape Memory Alloys(SMA)
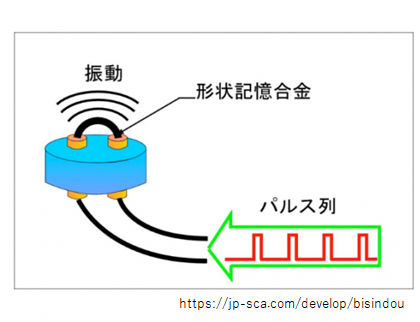
形状記憶合金にパルス信号を送ることで発生する微小振動に着目した研究を行っています。微小振動によって表面の触感・質感を変化できます。また、出力した電圧を測定することでセンサとしても活用でき、アクチュエータ・センサが一体となったマルチトランスデューサーとしてコンパクトなシステムの構築が可能となります。
早稲田大 澤田研 共同研究
- Chen, X., Ning, K., Shigemune, H., & Sawada, H. (2021). An untethered soft robotic fish using SMA wires and its performance analysis. International Journal of Mechatronics and Automation, 8(4), 229-240.
Electroadhesion
高電圧を印加することで発生する誘電分極を利用して物体同士が接着する、静電接着の研究を行っています。我々は、柔軟な電極パッドを開発することで、微小な凹凸がある面に対しても適応し、吸着性能の落ちないデバイスの開発に成功しました。
芝浦工大 前田研 共同研究
- Okuno, Y., Shigemune, H., Kuwajima, Y., & Maeda, S. (2019). Stretchable suction cup with electroadhesion. Advanced Materials Technologies, 4(1), 1800304.
Self-propelled Droplet
水面上をワイヤレスで駆動する物体輸送の研究として、自走油滴の研究を行っています。水溶液上に滴下された油滴にフレームを装着することで、内部に発生するマランゴニ対流、油滴の駆動方向・速度の制御を目指しています。
芝浦工大 前田研、早稲田 澤田研 共同研究
- Suzuki, A., Maeda, S., Hara, Y., & Hashimoto, S. (2012, October). Capsule gel robot driven by self-propelled oil droplet. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2180-2185). IEEE.
- Yamada, M., Shigemune, H., Maeda, S., & Sawada, H. (2019). Directional and velocity control of active droplets using a rigid-frame. RSC Advances, 9(69), 40523-40530.