

Journal and Major International Confference
※画像クリックで論文ページへ飛びます
2025
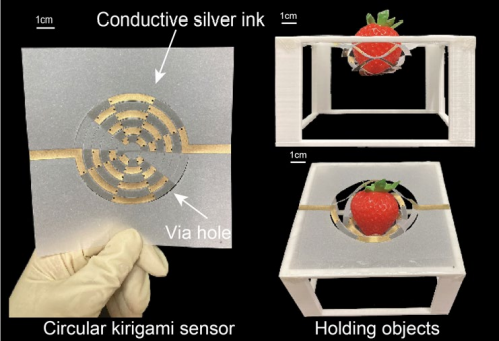
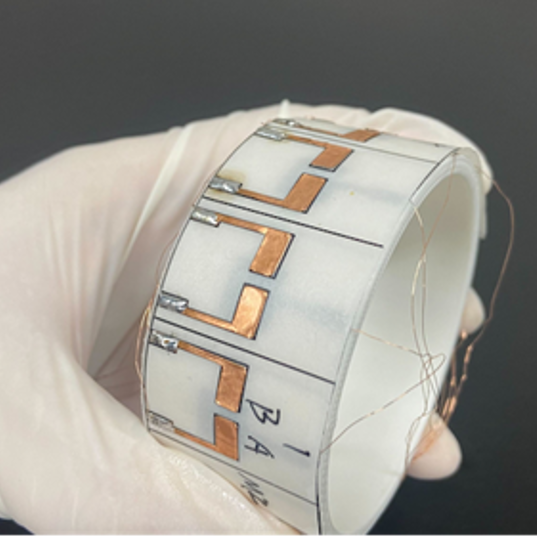
Circular Kirigami Structure with Out-of-Plane Deformation and Implementation of Double-Side Strain Sensor by Ink-Jet Printing
Paper Mechatronics Yamashita, S., Hikawa-Endo, M., Ishigaki, S., Yano, T., Yamanaka, R., Murakami, K., & Shigemune, H. (2025). Circular Kirigami Structure with Out-of-Plane Deformation and Implementation of Double-Side Strain Sensor by Ink-Jet Printing. IEEE Sensors Journal, 1-1.
2025
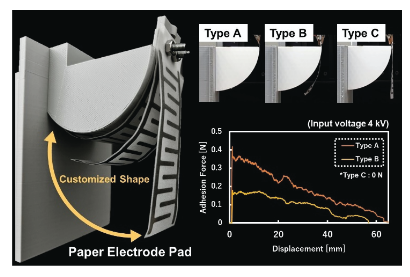
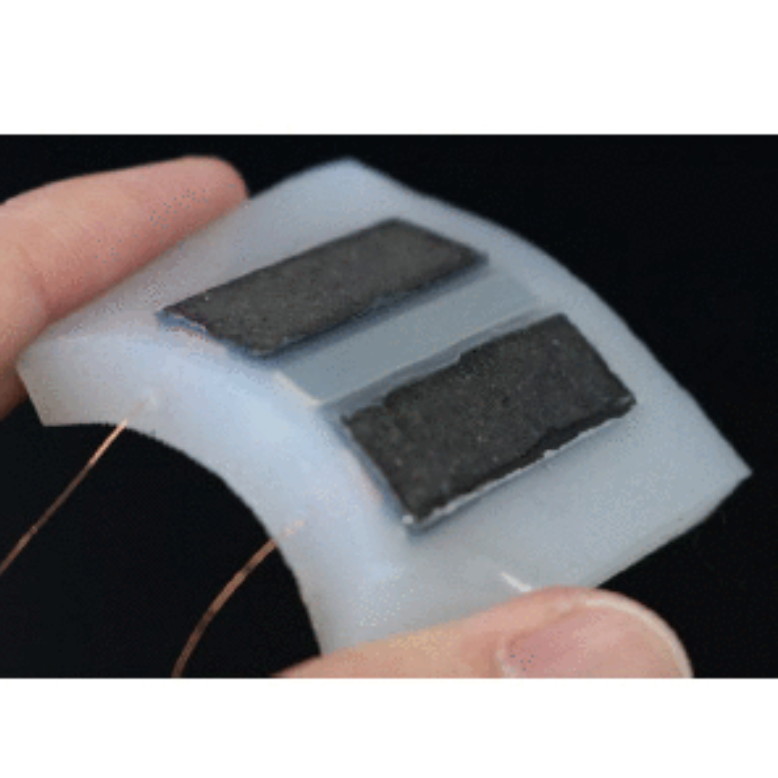
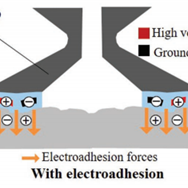
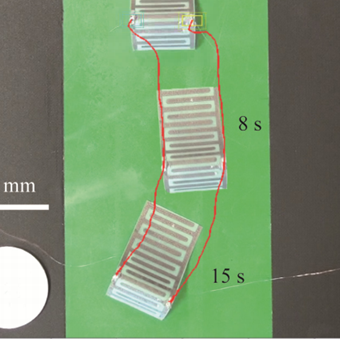
Adaptive Origami Electrostatic Adhesion Technology for Curved Objects
Paper Mechatronics Okamoto, S., Akitsu, Y., & Shigemune, H. (2025). Adaptive Origami Electrostatic Adhesion Technology for Curved Objects. Journal of Robotics and Mechatronics, 37(1), 23-32.
2025
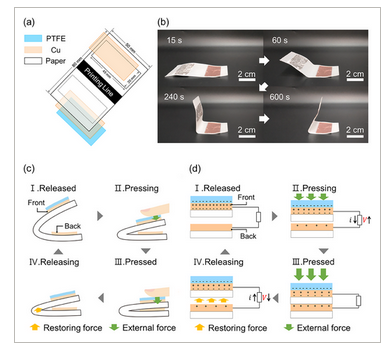
Self-Folded Corrugated Origami Sensor Based on Triboelectric Nanogenerator for a Smart Cushioning Device
Paper Mechatronics Higoshi, H., Naritomi, D., Kamiyauchi, S., Minamide, H., Yamashita, K., Ueno, S., … & Shigemune, H. (2025). Self‐Folded Corrugated Origami Sensor Based on Triboelectric Nanogenerator for a Smart Cushioning Device. Advanced Materials Technologies, 2500032.
2024
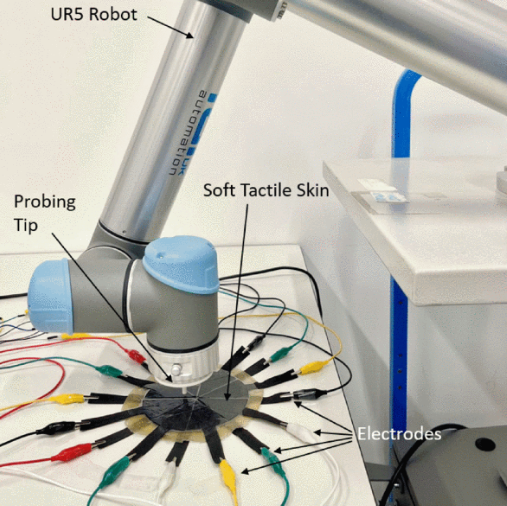
Multi-Layer Electrical Impedance Tomography Based Soft Tactile Skins
Paper Mechatronics Wang, Y., Naritomi, D., Shigemune, H., & Thuruthel, T. G. (2024, April). Multi-Layer Electrical Impedance Tomography Based Soft Tactile Skins. In 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft) (pp. 1101-1106). IEEE.
2024
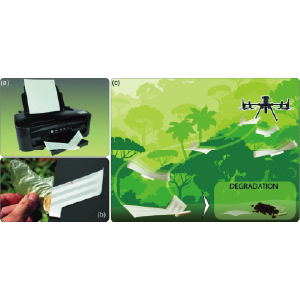
Biodegradable Gliding Paper Flyers Fabricated Through Inkjet Printing
Paper Mechatronics Girardi, L., Wu, R., Fukatsu, Y., Shigemune, H., & Mintchev, S. (2024, October). Biodegradable Gliding Paper Flyers Fabricated Through Inkjet Printing. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 10334-10341). IEEE.
2024
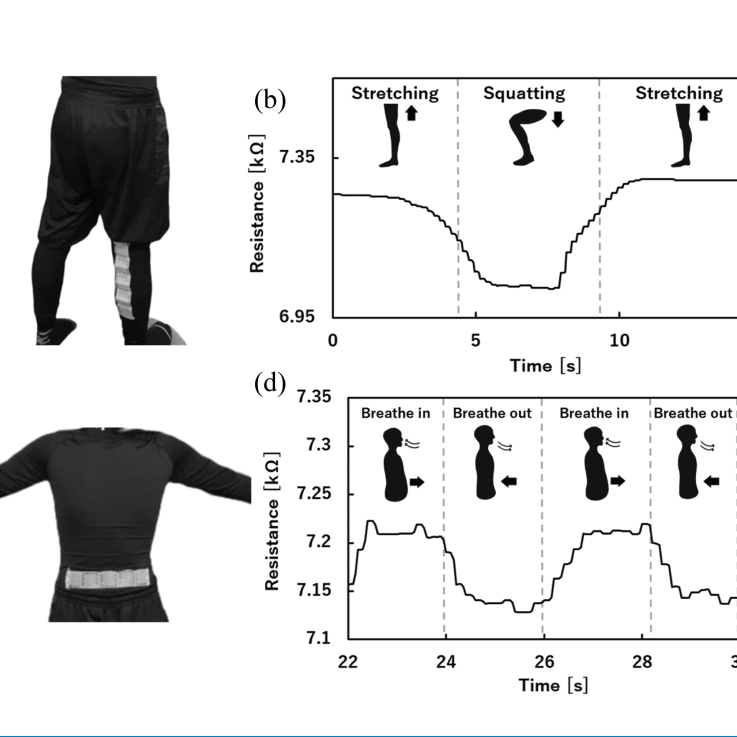
Origami-Inspired Corrugated Stretchable Sensor Fabricated by Inkjet Printing
Paper Mechatronics Harada, T., Fukatsu, Y., Waragai, N., Tsumura, R., & Shigemune, H. (2024). Origami-inspired corrugated stretchable sensor fabricated by inkjet printing. IEEE Sensors Letters.
2024
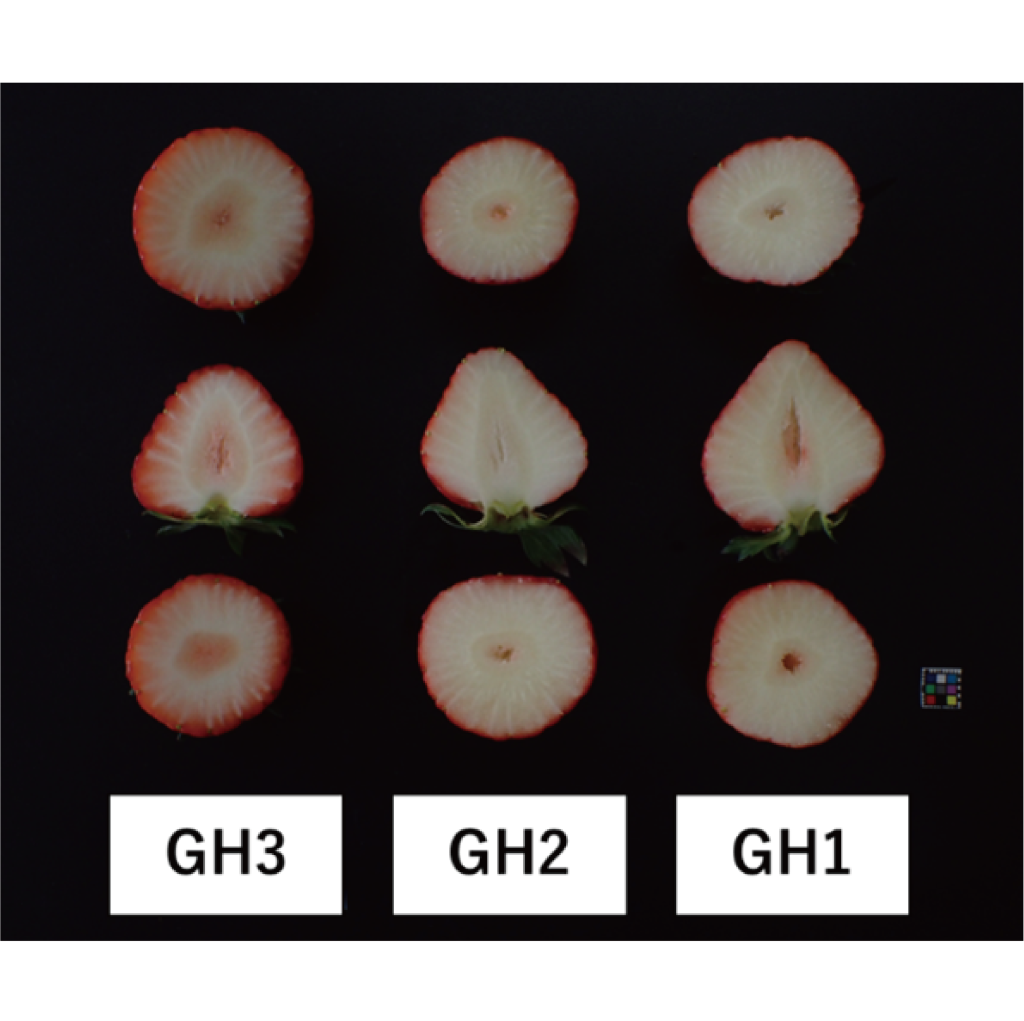
Estimation of strawberry fruit weight based on fruit diameter
Other Hikawa-Endo, M., Shigemune, H., Hojo, C., Yamaguchi, K., Murakami, K., Yano, T., & Yamanaka, R. (2023, August). Estimation of strawberry fruit weight based on fruit diameter. In IV Asian Horticultural Congress-AHC2023 1404 (pp. 1235-1240).
2024
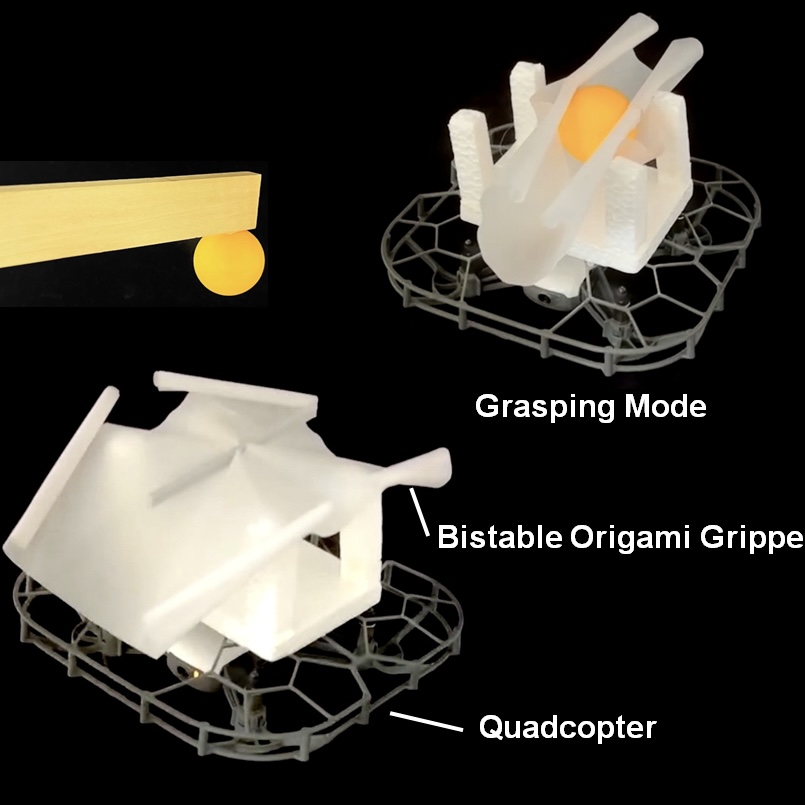
Paper-based bistable origami gripper to make quadcopters multi-functional
Paper Mechatronics Okamoto, S., Fukatsu, Y., Premachandra, C., & Shigemune, H. (2024). based bistable origami gripper to make quadcopters multi-functional. IEEE Robotics and Automation Letters.
2023
Shape Sensing with Electrostatic Differential Capacitance for Ultrasound Imaging by Flex Array Transducer
Other Hojo, C., Kawagishi, H., Shigemune, H., & Tsumura, R. (2023). Shape Sensing with Electrostatic Differential Capacitance for Ultrasound Imaging by Flex Array Transducer. IEEE International Conference on Soft Robotics(RoboSoft),April3-7.
2022
Soft-Skin Actuator Capable of Seawater Propulsion based on MagnetoHydroDynamics
Other Mutsuki, M., Kuwajima, Y., & Shigemune, H. (2022). Soft-Skin Actuator Capable of Seawater Propulsion based on MagnetoHydroDynamics. IEEE /RSJ International Conference on Intelligent Robotics and Systems(IROS),Oct 23-27.
2022
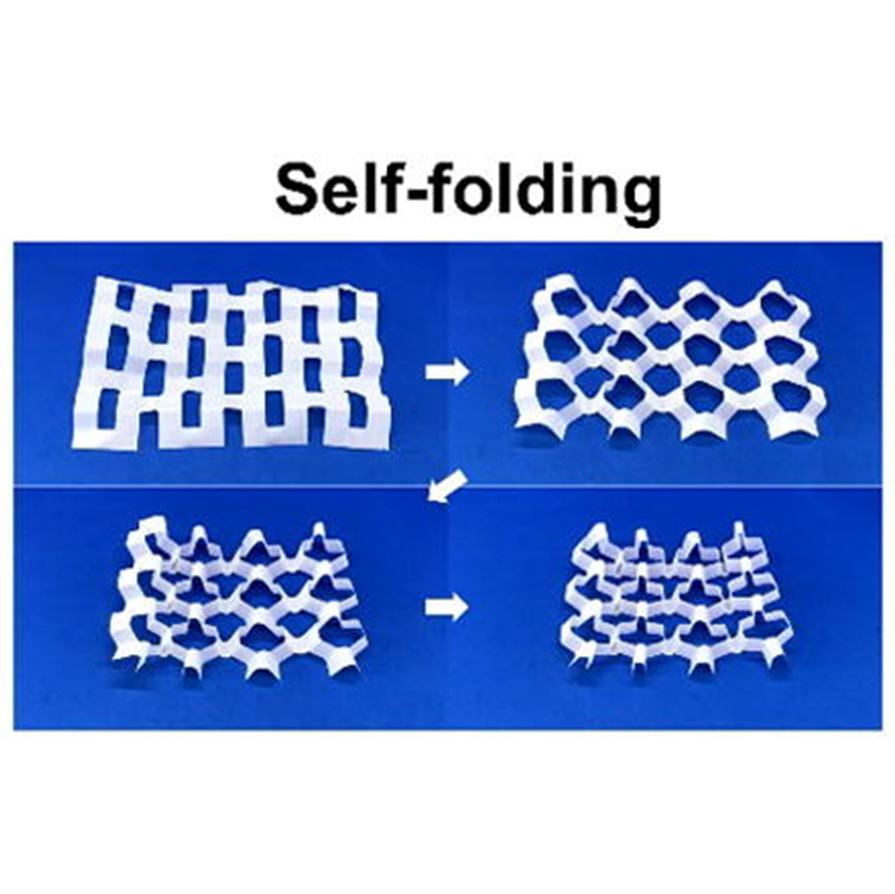
Creation of origami-inspired honeycomb structure using self-folding paper
Paper Mechatronics Naritomi, D., Hosoya, N., Ando, G., Maeda, S., & Shigemune, H. (2022). Creation of origami-inspired honeycomb structure using self-folding paper. Materials & Design, 223, 111146.

2022
Low-Voltage Activation Based on Electrohydrodynamics in Positioning Systems for Untethered Robots
Electro Hydro Dynamics(EHD) Abe, K., Seki, Y., Kuwajima, Y., Minaminosono, A., Maeda, S., & Shigemune, H. (2022). Low-Voltage Activation Based on Electrohydrodynamics in Positioning Systems for Untethered Robots. Journal of Robotics and Mechatronics, 34(2), 351-360.
2022
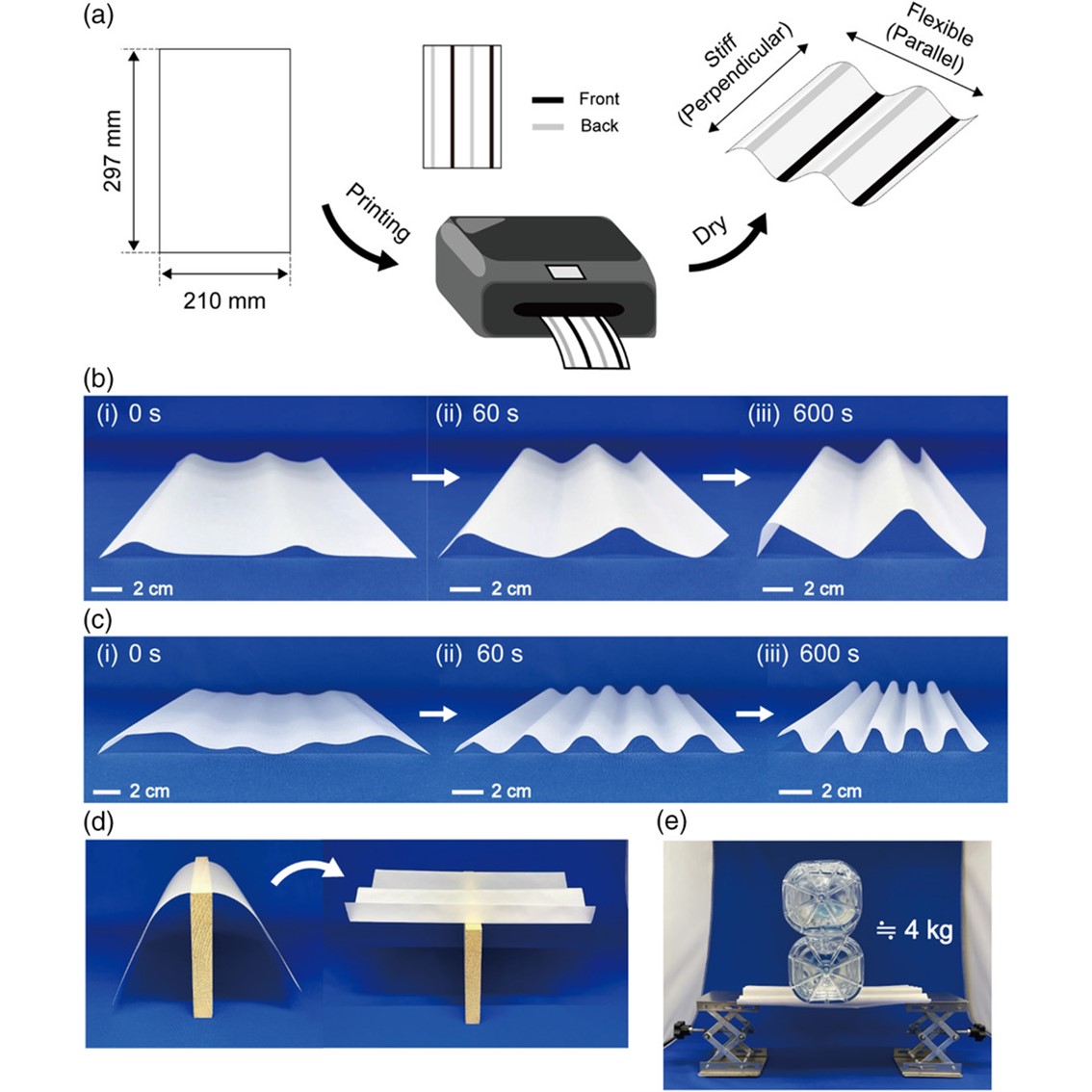
Development of Self-Folded Corrugated Structures Using Automatic Origami Technique by Inkjet Printing
Paper Mechatronics Fukatsu, Y., & Shigemune, H. (2022). Development of Self‐Folded Corrugated Structures Using Automatic Origami Technique by Inkjet Printing. Advanced Intelligent Systems, 2100260.
2022
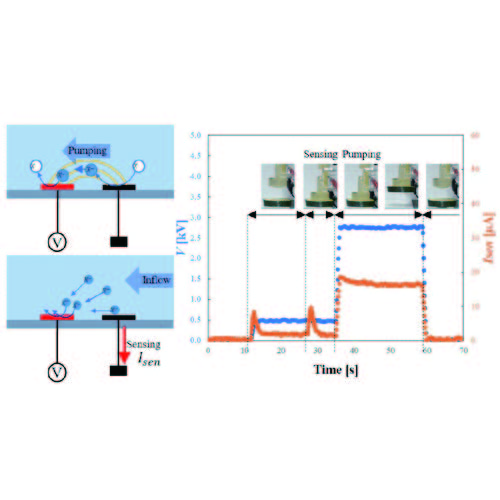
Electrochemical Dual Transducer for Fluidic Self-Sensing Actuation
Electro Hydro Dynamics(EHD) Kuwajima, Y., Seki, Y., Yamada, Y., Awaki, S., Kamiyauchi, S., Wiranata, A., Okuno, Y., Shigemune, H., & Maeda, S. (2022). Electrochemical Dual Transducer for Fluidic Self-Sensing Actuation. ACS Applied Materials & Interfaces.
2022
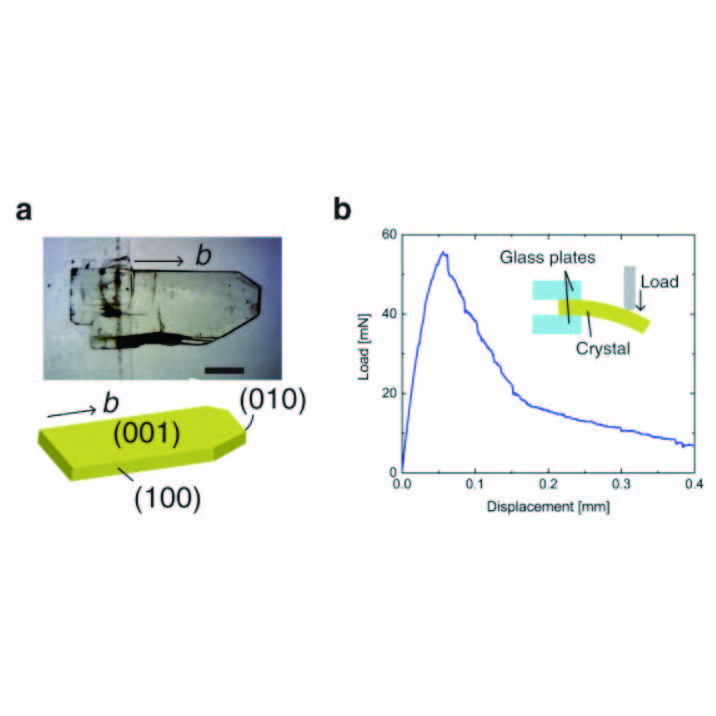
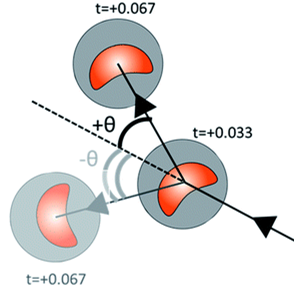
Superelasticity of a photo-actuating chiral salicylideneamine crystal
Other Taniguchi, T., Ishizaki, K., Takagi, D., Nishimura, K., Shigemune, H., Kuramochi, M., Sasaki, Yuji., Koshima, H., & Asahi, T. (2022). Superelasticity of a photo-actuating chiral salicylideneamine crystal. Communications Chemistry, 5(1), 1-10.
2021
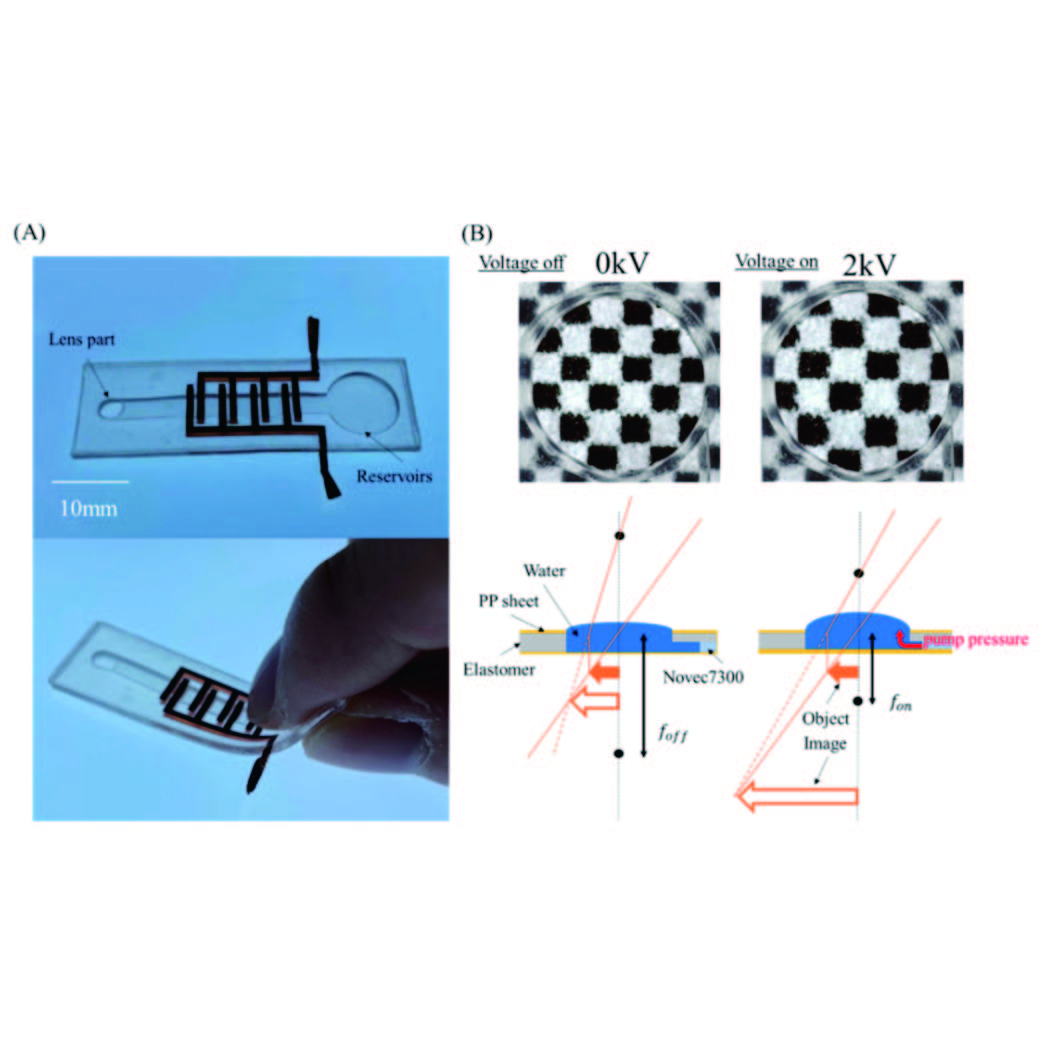
A DIY Fabrication Approach for Ultra-Thin Focus-Tunable Liquid Lens Using Electrohydrodynamic Pump
Electro Hydro Dynamics(EHD) Murakami, T., Kuwajima, Y., Wiranata, A., Minaminosono, A., Shigemune, H., Mao, Z., & Maeda, S. (2021). A DIY Fabrication Approach for Ultra-Thin Focus-Tunable Liquid Lens Using Electrohydrodynamic Pump. Micromachines, 12(12), 1452.
2021
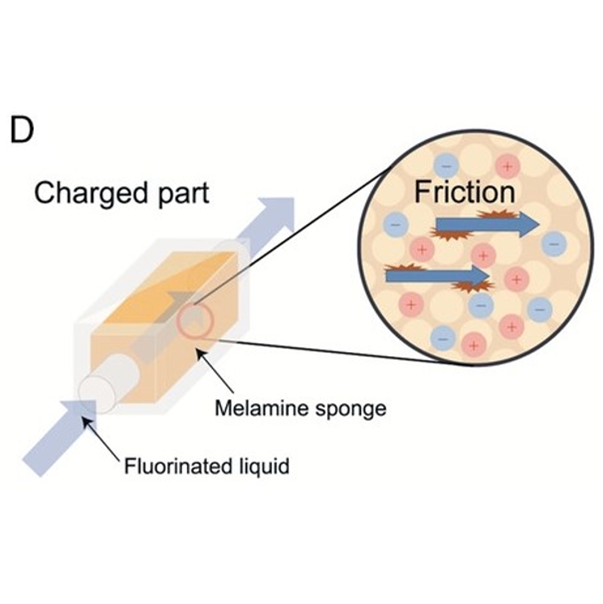
Fabrication of Soft and Wearable Electrostatic Generator Based on Streaming Electrification
Other Kamiyauchi, S., Yokoyama, Y., Kuwajima, Y., Seki, Y., Awaki, S., Maeda, S., & Shigemune, H. (2021). Fabrication of Soft and Wearable Electrostatic Generator Based on Streaming Electrification. Advanced Intelligent Systems, 2100131.
2021
Wireless Electrohydrodynamic Actuators for Propulsion and Positioning of Miniaturized Floating Robots
EHD Shigemune, H., Pradidarcheep, K., Kuwajima, Y., Seki, Y., Maeda, S., & Cacucciolo, V. (2021). Wireless Electrohydrodynamic Actuators for Propulsion and Positioning of Miniaturized Floating Robots. Advanced Intelligent Systems, 2100004.
2021
Four‐dimensional collision detection and behaviour based on the physics‐based calculation
Other Nakai, Y., Miwa, T., Shigemune, H., & Sawada, H. (2021). Four-dimensional collision detection and behaviour based on the physics-based calculation. Expert Systems,
2021
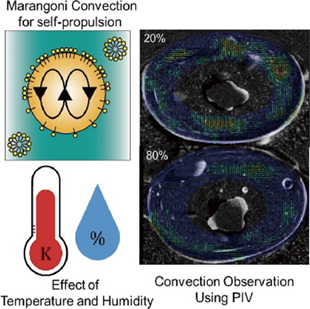
Temperature and Humidity Dependence of Marangoni Convection and Its Effect on the Self-propulsion of an Oil Droplet
Self-propelled Droplet Yamada, M., Shigemune, H., Maeda, S., & Yamada, M., Shigemune, H., Maeda, S., & Sawada, H. (2021). Temperature and Humidity Dependence of Marangoni Convection and Its Effect on the Self-propulsion of an Oil Droplet. Chemistry Letters, 50(3), 493-496.

2020
Programming Stepwise Motility into a Sheet of Paper Using Inkjet Printing
Paper Mechatronics Shigemune, H., Maeda, S., Iwase, E., Hashimoto, S., Sugano, S., & Sawada, H. Programming Stepwise Motility into a Sheet of Paper Using Inkjet Printing. Advanced Intelligent Systems, 2000153.

2020
Optimization of the Electrode Arrangement and Reliable Fabrication of Flexible EHD Pumps
Electro Hydro Dynamics(EHD) Seki, Y., Kuwajima, Y., Shigemune, H., Yamada, Y., & Maeda, S. (2020). Optimization of the Electrode Arrangement and Reliable Fabrication of Flexible EHD Pumps. Journal of Robotics and Mechatronics, 32(5), 939-946.
2020
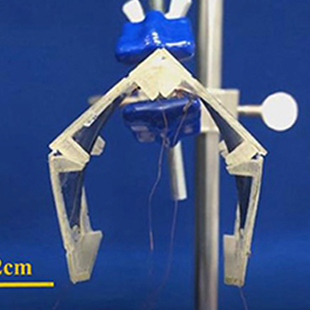
Self-Assembled 3D Actuator Using the Resilience of an Elastomeric Material
Dielectric Elastomer Actuators(DEA) Hashimoto, N., Shigemune, H., Minaminosono, A., Maeda, S., & Sawada, H. (2020). Self-Assembled 3D Actuator Using the Resilience of an Elastomeric Material. Front. Robot. AI 6: 152. doi: 10.3389/frobt.
2019
Directional and velocity control of active droplets using a rigid-frame
Self-propelled Droplet Yamada, M., Shigemune, H., Maeda, S., & Sawada, H. (2019). Directional and velocity control of active droplets using a rigid-frame. RSC Advances, 9(69), 40523-40530.
2019
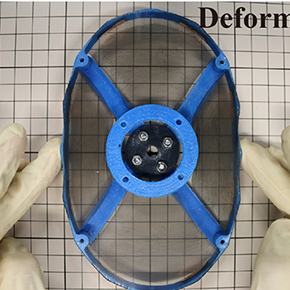
A Deformable Motor Driven by Dielectric Elastomer Actuators and Flexible Mechanisms
Dielectric Elastomer Actuators(DEA) Minaminosono, A., Shigemune, H., Okuno, Y., Katsumata, T., Hosoya, N., & Maeda, S. (2019). A deformable motor driven by dielectric elastomer actuators and flexible mechanisms. Frontiers in Robotics and AI, 6, 1.
2019
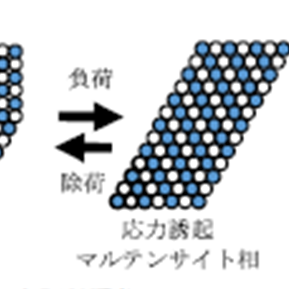
微小振動する形状記憶合金ワイヤを用いた触覚センサ
Shape Memory Alloys(SMA) 宮戸田顕音, 重宗宏毅, 三輪貴信, & 澤田秀之. (2019). 微小振動する形状記憶合金ワイヤを用いた触覚センサ. 電子情報通信学会論文誌 C, 102(9), 241-248.
2018
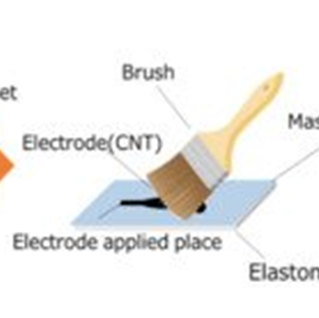
Dielectric Elastomer Actuators with Carbon Nanotube Electrodes Painted with a Soft Brush
Dielectric Elastomer Actuators(DEA) Shigemune, H., Sugano, S., Nishitani, J., Yamauchi, M., Hosoya, N., Hashimoto, S., & Maeda, S. (2018, September). Dielectric elastomer actuators with carbon nanotube electrodes painted with a soft brush. In Actuators (Vol. 7, No. 3, p. 51).
2018
Stretchable Suction Cup with Electroadhesion
Electroadhesion Okuno, Y., Shigemune, H., Kuwajima, Y., & Maeda, S. (2019). Stretchable suction cup with electroadhesion. Advanced Materials Technologies, 4 (1), 1800304.

2017
Conduction Electrohydrodynamics with Mobile Electrodes: A Novel Actuation System for Untethered Robots
Electro Hydro Dynamics(EHD) Cacucciolo, V., Shigemune, H., Cianchetti, M., Laschi, C., & Maeda, S. (2017). Conduction electrohydrodynamics with mobile electrodes: a novel actuation system for untethered robots. Advanced Science, 4(9), 1600495.
2017
Printed paper robot driven by electrostatic actuator
Paper Mechatronics Shigemune, H., Maeda, S., Cacucciolo, V., Iwata, Y., Iwase, E., Hashimoto, S., & Sugano, S. (2017). Printed paper robot driven by electrostatic actuator. IEEE Robotics and Automation Letters, 2(2), 1001-1007.
2017
Electrohydrodynamic Conduction Pump with Asymmetrical Electrode Structures in the Micro-channels
Electro Hydro Dynamics(EHD) Sato, T., Yamanishi, Y., Cacucciolo, V., Kuwajima, Y., Shigemune, H., Cianchetti, M., … & Maeda, S. (2017). Electrohydrodynamic conduction pump with asymmetrical electrode structures in the microchannels. Chemistry Letters, 46(7), 950-952.
2016
Origami Robot: A Self-Folding Paper Robot With an Electrothermal Actuator Created by Printing
Paper Mechatronics Shigemune, H., Maeda, S., Hara, Y., Hosoya, N., & Hashimoto, S. (2016). Origami robot: a self-folding paper robot with an electrothermal actuator created by printing. IEEE/ASME Transactions on Mechatronics, 21(6), 2746-2754.